レーザを凌ぐコストパフォーマンス
小穴、長穴、角穴加をコンパス軸を設けることにより高精度加工を実現しました。
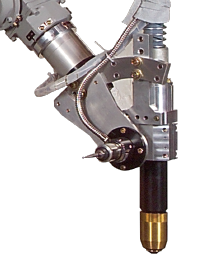
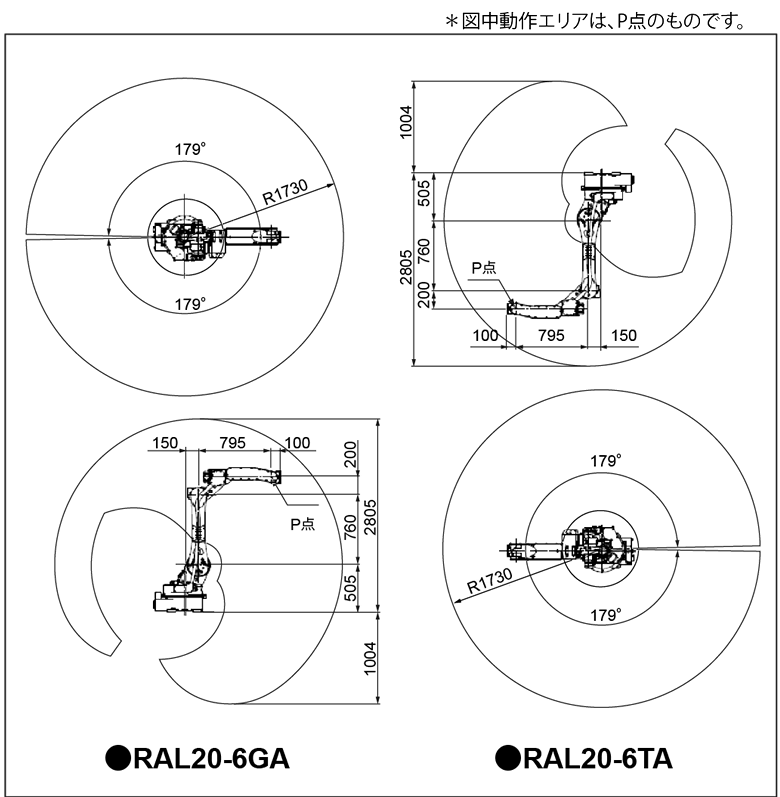
ツイスター切断ロボット

| タイプ | RAL20-6GA | RAL20-6TA | ||
| 動作自由度 | 6軸 | 6軸 | ||
| 回転半径 | 最大 | 1730mm | 1730mm | |
| 動作範囲 | 腕 | 1軸(旋回) | ±179° | ±179° |
| 2軸(前後) | 'ー70°~+135° | 'ー70°~+135° | ||
| 3軸(上下) | '-135°~+81° | '-135°~+81° | ||
| 手首 | 4軸(捻り) | ±179° | ±179° | |
| 5軸(振り) | ±140° | ±179° | ||
| 6軸(回転) | ±270° | ±270° | ||
| 最大速度 | 腕 | 1軸(旋回) | 60°/s | 60°/s |
| 2軸(前後) | 70°/s | 70°/s | ||
| 3軸(上下) | 70°/s | 70°/s | ||
| 手首 | 4軸(捻り) | 170°/s | 170°/s | |
| 5軸(振り) | 160°/s | 160°/s | ||
| 6軸(回転) | 260°/s | 260°/s | ||
| 項目 | 仕様 |
| 小円コンパス | 小円加工機能(φ3~40) |
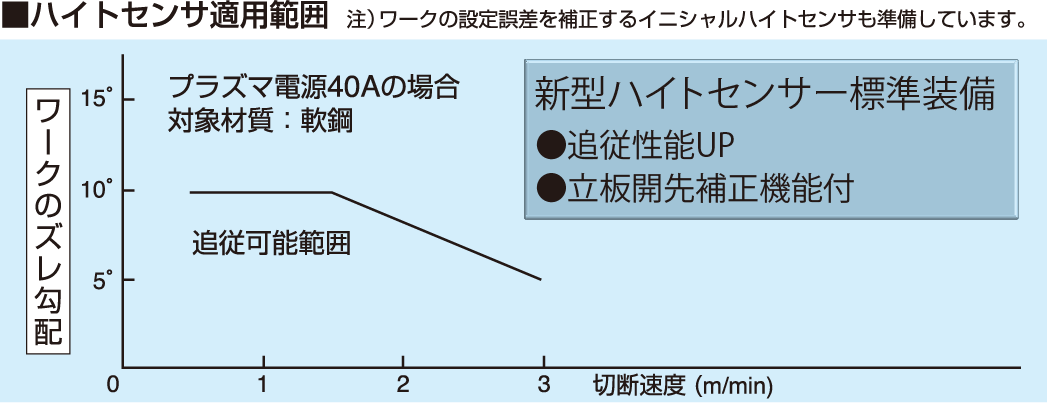
| イニシャルハイトセンサー | 切断開始高さの検出 |
| ワークセンサ | 切断開始位置の検出 |
| ヒューム処理装置 | 用途に応じ提案します |
| ガス切断装置 | 板厚切断に対応します |
| 項目 | 仕様 | |
| 本体構造 | 構造 | 防塵構造(IP54) |
| 外形寸法 | 幅700×奥行500×高さ1250(熱交換器109mm) | |
| 質量 | 最大160kg(外部軸盤除く) | |
| 冷却方式 | 熱交換器(オプション:クーラ冷却) | |
| '周辺温度 | '通電時:0~+45℃ , 保管時:-10~+60℃ | |
| '相対湿度 | '最大90%(結露のないこと) | |
| 電源仕様 | 三相AC200V(+10%、-15%)50/60Hz | |
| 接地 | D種(接地抵抗100Ω以下単独接地であること) | |
| 入出力 | 入出力信号 | 入力56、出力56(専用入出力含む) |
| 最大入出力信号 | 224点(オプション) | |
| アナログ出力/入力 | 出力4ch/入力5ch | |
| 上位通信 | EtherNet | |
| 制御 | 位置制御方式 | シリアルエンコーダ(絶対値エンコーダ) |
| 記憶容量 | 40000ステップ相当 | |
| 外部記憶装置 | CFカード/USBメモリ |
| 項目 | 仕様 | |
| 操作ペンダント | 名称 | ティーチングペンダント(TP) |
| 表示 | 和英中語 40字8行、発光液晶表示 | |
| 重量 ケーブル長さ | 990g 最大48m | |
| デッドマンスイッチ | 3ポジションデッドマンスイッチ標準 | |
個人情報保護とCookieの使用について
当サイトでは、お客さまにより快適にウェブサイトをご利用いただくためCookieを使用させていただくことがあります。
当サイトをご覧いただく際は、Cookieの使用に同意ください。
また、このままサイトを閲覧し続けた場合もCookieの使用に同意したとみなします。
ブラウザの設定により、Cookieの受信を拒否することが可能です。


